
בן-יה יצחק הלוי
הנדסה מכנית
בהנחיית: מנחה:צחי שוחט
מערכת למניעת התהפכות לרכב רובוטי אוטונומי

בן-יה יצחק הלוי
הנדסה מכנית
בהנחיית: מנחה:צחי שוחט
התמחות: מכטרוניקה ומכניקת מוצק
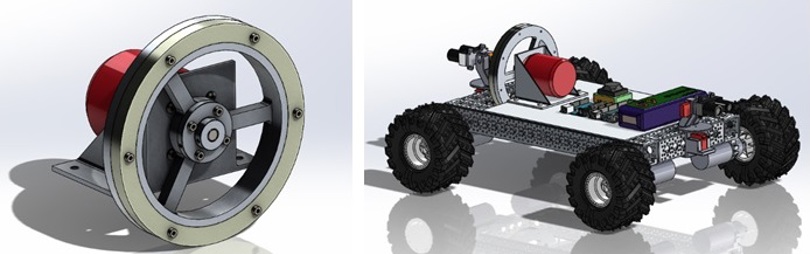
מטרת הפרויקט היא פיתוח מערכת למניעת התהפכות ברכב רובוטי אוטונומי בהתאם לשינוי זווית הגלגול של הרכב בזמן אמת. המערכת מתבססת על מימוש בקרת בלימה ופיתוח מנגנון ייחודי להעברת מומנט ישירה, בהנעת גלגל ריאקציה.
בפיתוח פלטפורמת הרכב עלה חשש להתהפכותו תוך כדי נסיעה בתנאים משתנים בעיקר לנוכח העובדה שאין נהג ברכב. עקב כך, הוצע לפתח מערכת ייעודית שתזהה את מצבי ההתהפכות ותגיב בזמן אמת לשינויים בהטיית הרכב. מערכת זאת משלבת בקרת בלימה, בדומה לרכבים קיימים, עם מנגנון להעברת מומנט ישירה בעזרת סיבוב של גלגל ריאקציה שימוקם בתוך הרכב ויופעל בזמן אמת בהתאם לצורך.


מערכת למניעת התהפכות לרכב רובוטי אוטונומי
שתף לינק באמצעות:
https://www.afeka.ac.il/student-experience/learn-differently/projects-department/מערכת-למניעת-התהפכות-לרכב-רובוטי-אוטונומי/WhatsApp
Facebook
Twitter
Email
https://www.afeka.ac.il/student-experience/learn-differently/projects-department/מערכת-למניעת-התהפכות-לרכב-רובוטי-אוטונומי/